 Engineer News Network The ultimate online news and information resource for today’s engineer
Engineer News Network The ultimate online news and information resource for today’s engineer
For OEMs that require miniaturised motion systems with higher ratio gear reduction, maintaining compact dimensions is a key requirement. Commonly, these applications also need optimal power density as well as transmission efficiency. From use in robotics through to medical infusion systems, differential compact drives can deliver reduction of over 300:1 in a small, two-stage design. Vivek Salve explains the advantages of the differential compact drive design
Wearable injection devices deliver vital drugs such as insulin to the patient at planned intervals in the comfort of their own home. A key requirement of a wearable injection system is small size, giving the patient comfort with optimum usability. As a mobile device, these systems must also be energy efficient, and for round-the-clock use, quiet operation is important as well.
The motion system that drives the device, including the motor and gearbox, also has to fulfil these needs. These have to be highly compact and lightweight yet provide the required power demand. While the motion system has to be able to deal with varying liquid viscosities – hence the requirement for a capable torque range – the gearbox also has to be able to provide a sufficiently high-speed reduction. This ensures it can give the control and accuracy vital for precision drug delivery.
Applications with similar requirements include the control of collimators used to filter x-rays and gamma-rays, as well as the motion of antenna positioning systems. A key requirement common to these uses is a gearbox that delivers high reduction, combined with a compact length. To fit these needs, differential compact drives have been developed. Also known as a compound planetary gear train or a compact planetary differential, this gearbox provides a mass-to-reduction ratio that is significantly lower compared with a planetary gear design.
Conventional planetary gear technologies are the choice for many applications as a result of their power transmission efficiency and relatively high power density. However, there are constraints, the most significant of which is the relatively low ratios that can be achieved. Typically, single-stage planetary gearhead ratios range from 3:1 up to 10:1, and this upper limit cannot be exceeded because above that range, pinion gears become too small for reliable or effective operation.
Inversely, planetary designs cannot reduce less than 3:1 as the similarly sized pinion and sprocket below this ratio wouldn’t allow space for the planet gears. As a result, the best combination of pinion and planet-gear size, performance, and life are ratios between 4:1 and 8:1.
Higher ratios than 10:1 can be achieved by designing in an additional planetary stage or stages, but this increases length of the unit, making it less attractive for applications that need a compact footprint. Additional stages also increase the number of moving parts, adding to the noise and weight of the system as a whole. For the same reason, friction is also increased, reducing the overall efficiency of the design, as well as reliability and lifetime. Crucially for an OEM, any additional stage also adds an extra cost burden.
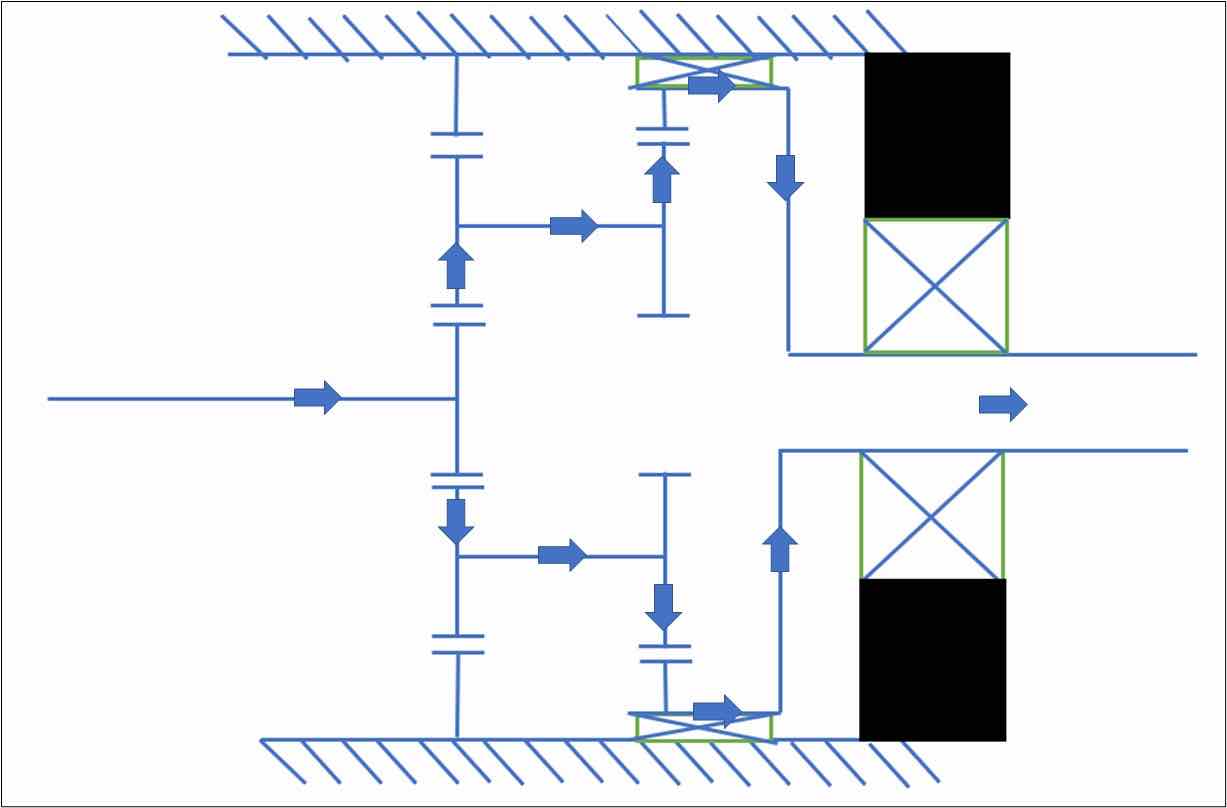
In many epicyclic gear train applications, the ring gear is fixed, while the star carrier is the output, and the sun gear is the input to the planetary system. Alternatively, the differential compact drive comprises a two-stage split ring epicyclic gearing system. The input stage ring gear is fixed, while the output stage ring gear is rotating, connected to and driving the output shaft. In this system, the input stage features planetary gearing; the output of this stage becomes the input to the second stage, where the ring gear of output stage is the final output.
The benefit of this design is that the reduction ratio and power output is much higher. At the same time, the differential compact drive achieves a much more compact footprint. The reduction can reach higher than 300:1 in a two-stage compound planetary differential, a ratio that could only be achieved with a conventional planetary design by adding three or four stages.
Schematic diagram for concept of Differential Compact Drive
Applications that depend on the high limits of torque requirement might choose to remain with a conventional planetary design. Similarly, differential compact drives aren’t the desired options at the far extremes of reduction, below 50:1 and above 400:1. Most industrial applications though, such as those within robotics, industrial tools, and medical infusion systems, are within the gear reduction range. Engineers striving to achieve designs that are compact, highly efficient, and low noise, should consider differential compact drives as a favorable gearbox option.
Vivek Salve is Lead Mechanical Design Engineer for Gearboxes at Portescap.




